![]()
Tricycle steering geometry - the spreadsheetsWhy?There have been a few 'rules of thumb' developed over the years for practical steering linkages to give reasonable Ackermann steering. The best-known is the 'point the track rods at the rear wheel' rule, but this is only occasinally anywhere near correct, and is useless for many linkages commonly used on trikes. I couldn't find anywhere a simple program which could quantify errors for a given linkage, and could be used to optimise the design, taking account of all the relevant geometry. So I wrote these spreadsheets. You enter the variables, and the program gives you the deviation from ideal Ackermann at various turn radii. You can change most elements of the linkage geometry, so as to arrive at a practical design with minimum scrub. These spreadsheets are now used as a design aid by almost every major recumbent trike manufacturer in the world. These manufacturers also add in a lot of experimentation, detail design and development to result in their finished products. Be clear that these spreadsheets are a starting point, NOT an instruction kit to design perfect steering first time.
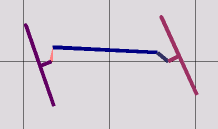
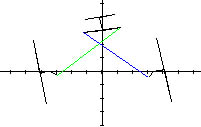
Linkages modelledI couldn't see an easy way to model arbritary linkages, so instead created versions of the spreadsheet for the most common linkages used on trike steering:
RestrictionsThe main and most obvious restriction is that the spreadsheets model things strictly in two dimensions. It assumes the kingpins are vertical, so they just appear as points when looked on from above... So when you start inclining the kingpins in various directions as discussed in the previous section, you start departing from what's modelled here. The more the kingpins (or the axis on which the handlebar pivots, etc) are inclined, or if the various pivots are at different heights, then the more you'll depart from the 2D approximation. Luckily, experience has shown that the results are usually plenty good enough even with this approximation. I may eventually do a full 3D model, but doing this is FAR more complicated than a 2D spreadsheet, both to produce and to use. For now, live with the approximation, or go away and program it in 3D yourself. How the sheets workStill to be written - sorry Previous: introduction -- Steering home -- Next: downloads |
![]()
![]()
![]()
![]()
![]()
![]()
 Type 1
Type 1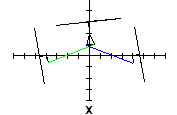 Type 2
Type 2